I. Intro
Date: July 2024
ROS1 is done, and it’s time for ROS2. The hardware has no change, and it can be found here.
The code and my learning notes are on Github: https://github.com/DML-0205Michael/ROS2
II. Sub-System Tests
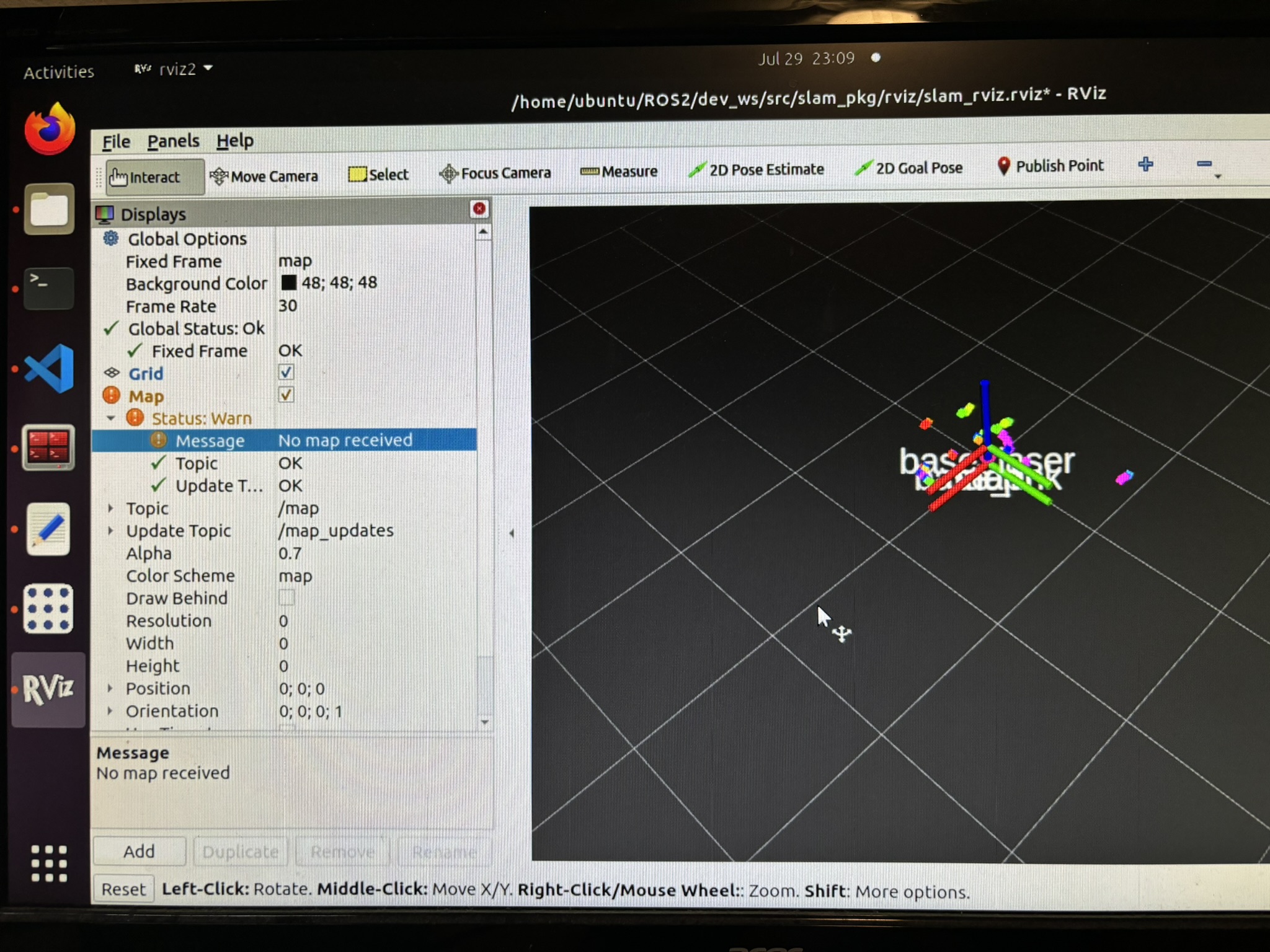
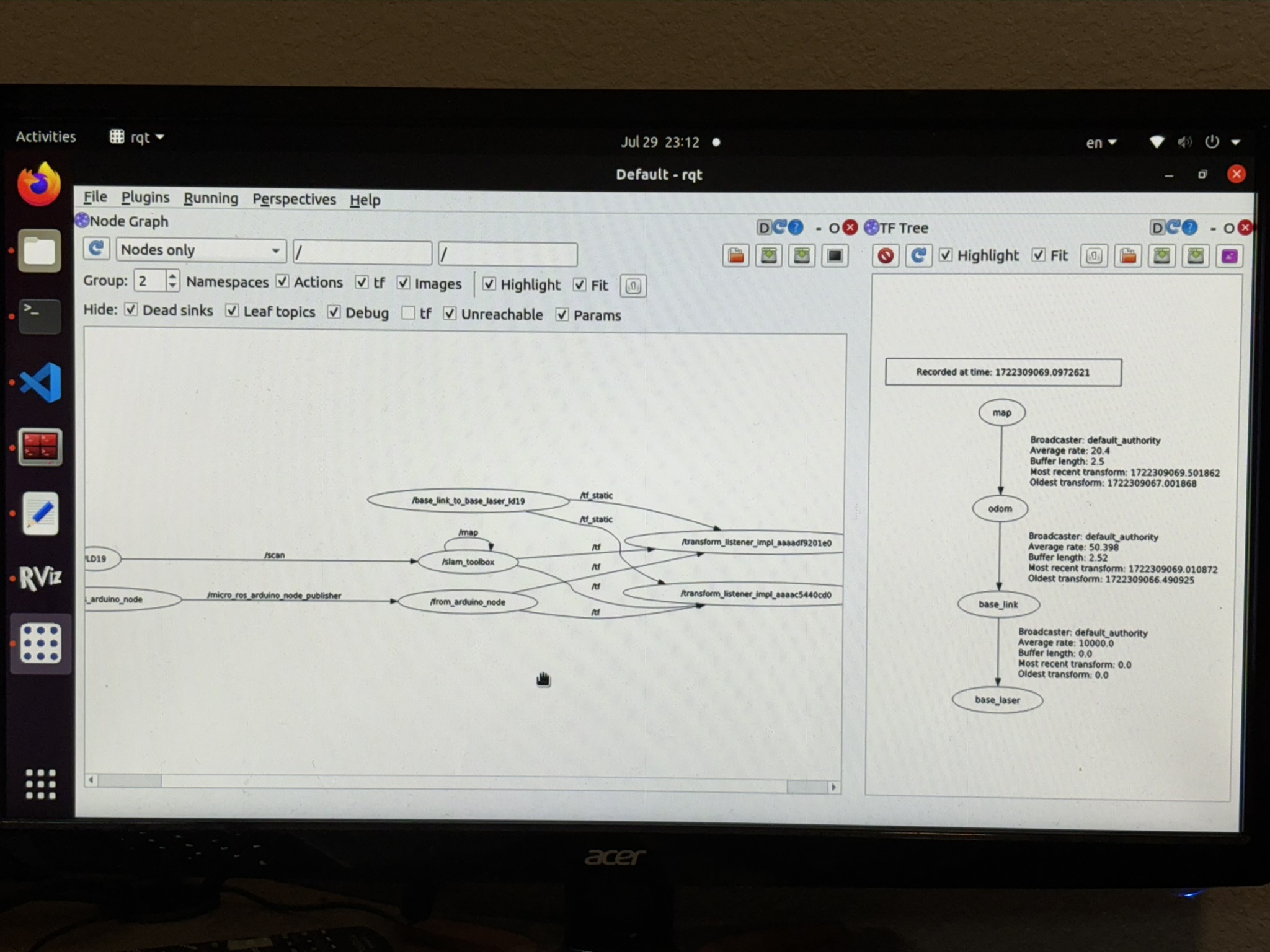
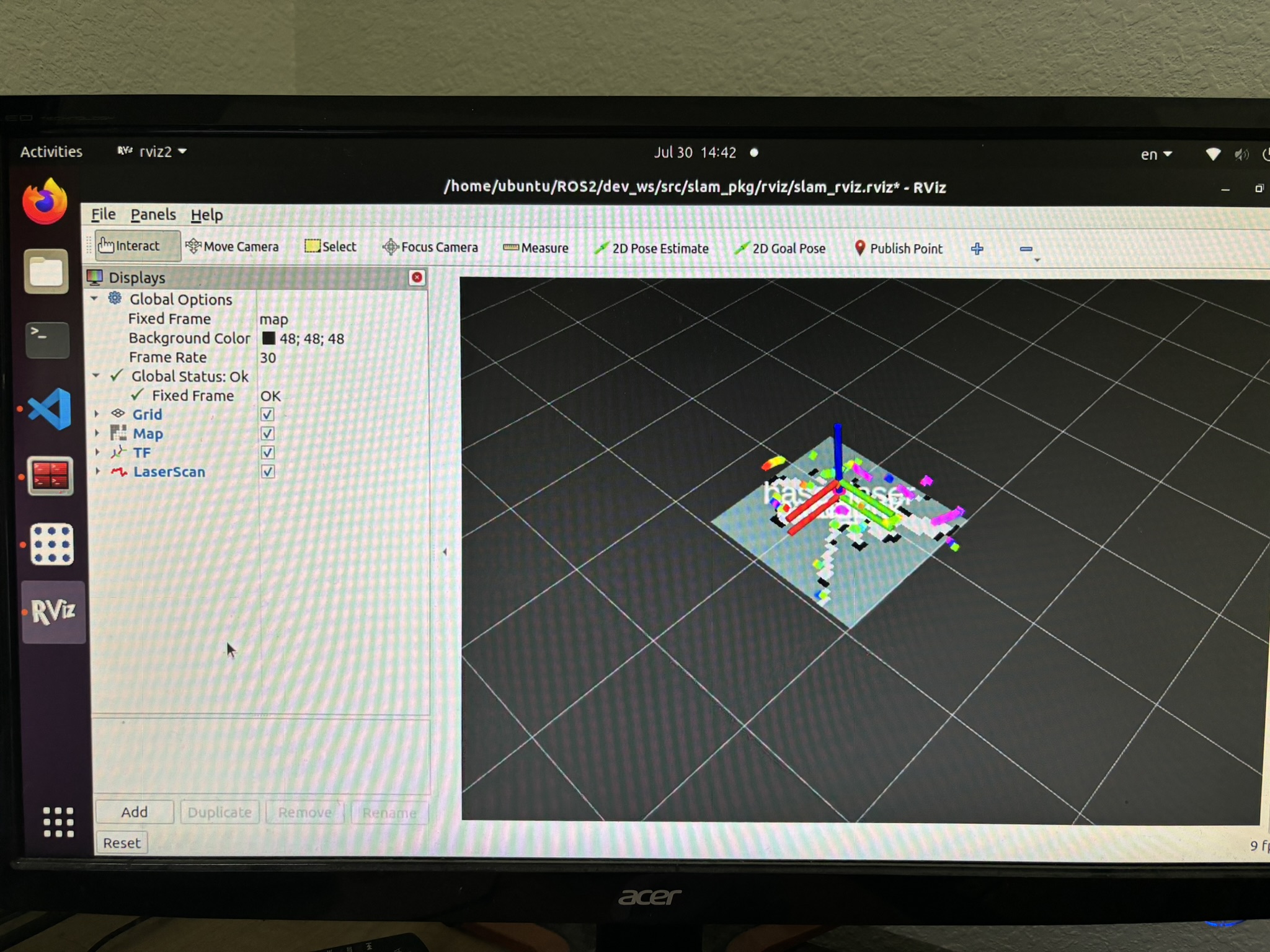
III. SLAM with slam-toolbox
IV. Navigation
ROS2 developers need to improve their code to make the navigation work properly in the real world, not only in simulation.