I. Intro
Date: April 2023.
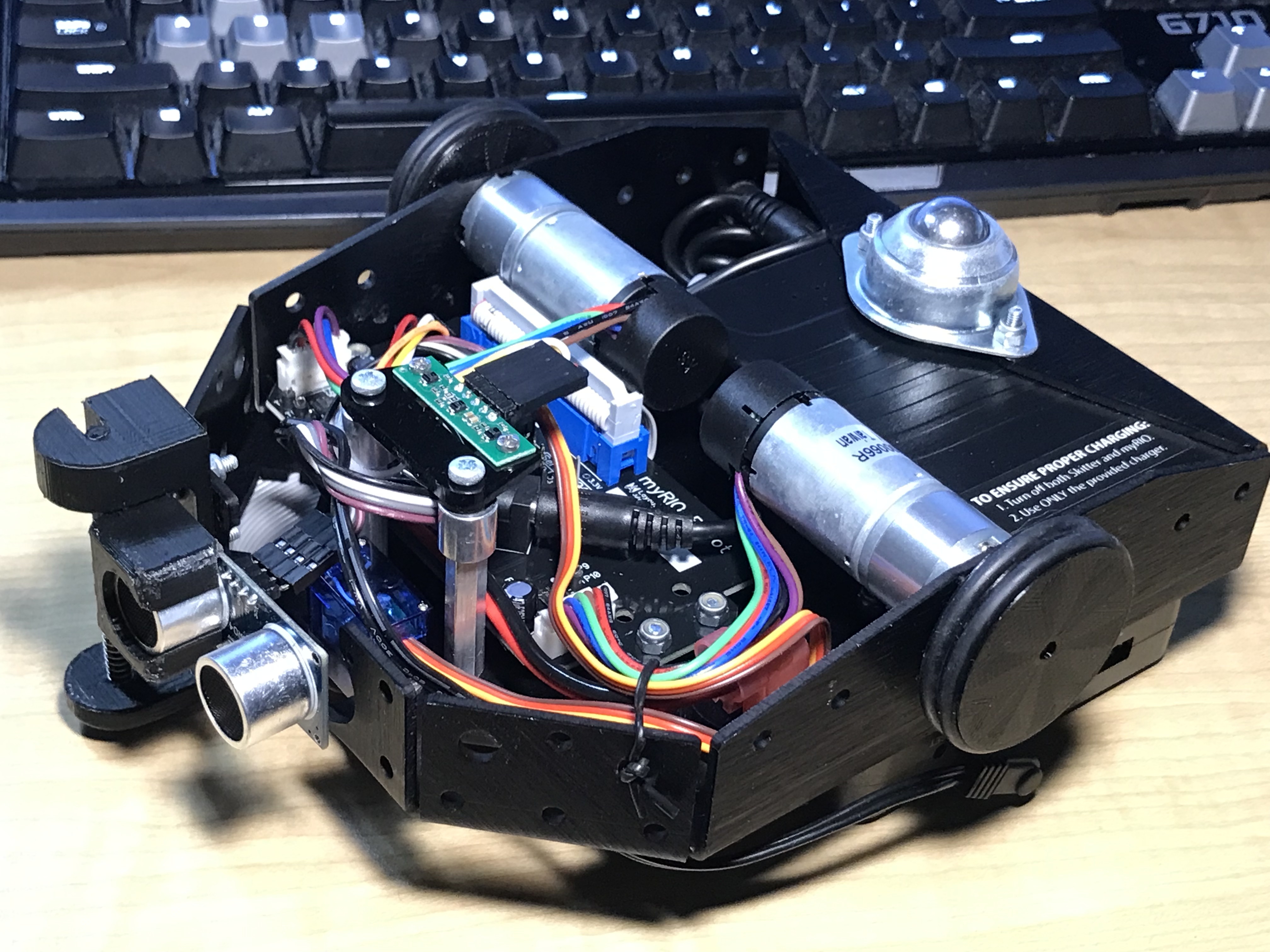
In this lab, we built a robot with a line-following sensor, a sonic sensor, two motors with encoders, and a myRio. You can find almost everything in the report below, but I didn’t include the sonic sensor adapter. There was an extra competition that I didn’t have time to participate. There was a box in the middle of the running field, and the time of two laps around the box is recorded. Someone tuned the robot to follow the line super fast in order to overcome the larger distance. I decided to turn the sonic sensor 90 degrees and let it measure the relative distance to the box. The target value would be fixed, and the measured value was directly from the sensor, so the controller would be straightforward. However, later on, we found out the data from the sonic sensor was very fluctuating, which means my suggestion might not even work without the help of another sensor and Kalman filter.

II. The Report
III. Sonic Sensor Holder
