I. Intro
Date: 10/01/2023
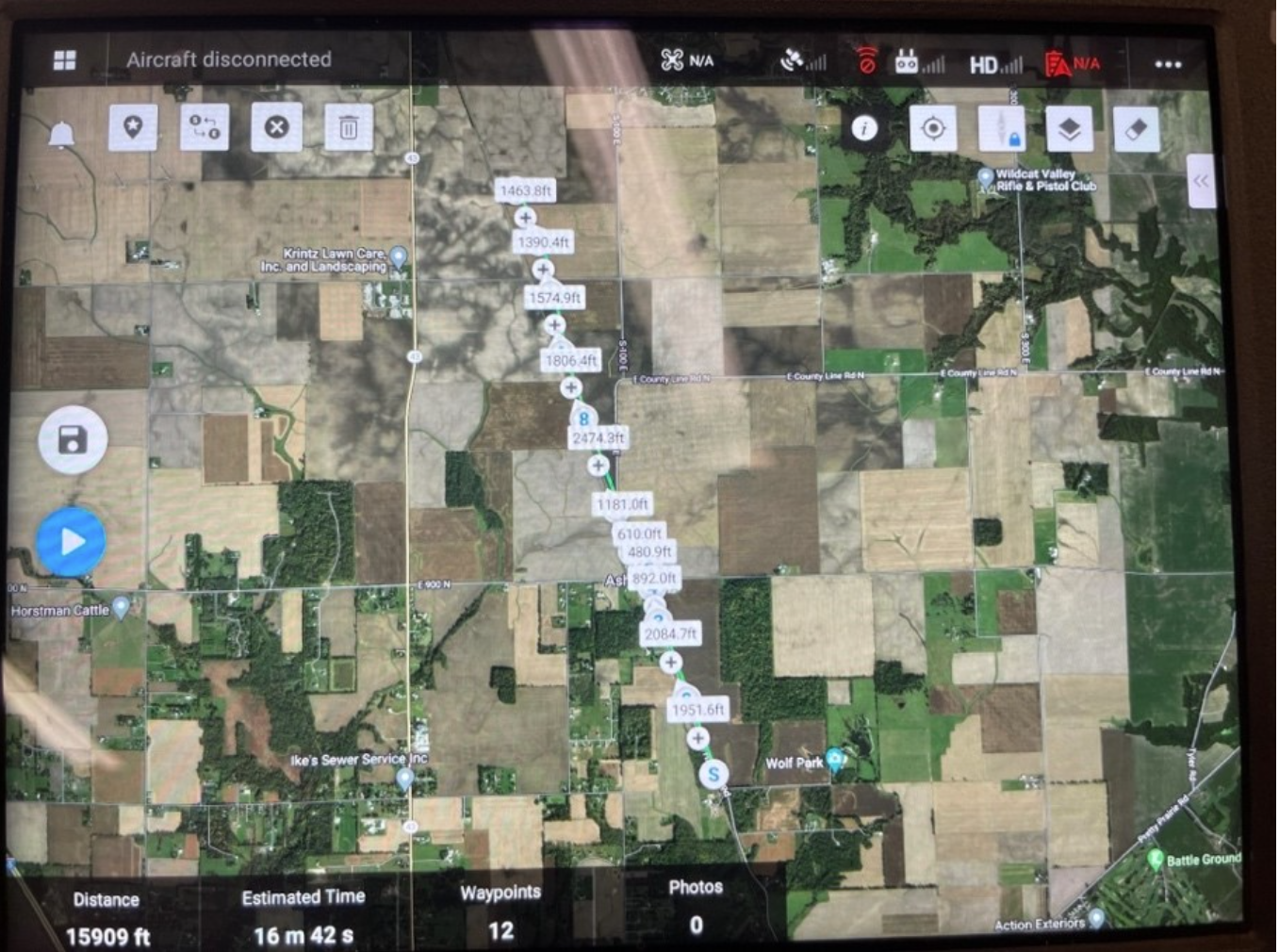
We setup a way point mission, and let DJI M210 fly on its own. Basically I am just watching it. I really want to fly it in attitude mode.
II. Side and Weather Conditions
Take-off Location: 40.533502 N, -86.841221 W
Landing Location: 40.574528 N, -86.849778 W
There were wires and poles following along the road. The railroad was to its west. The area other than these two were just fields.


III. Flight Information
A. Way-Point
Although it doesn’t show on the picture, when we were trying to start the mission, the way point was in the warning zone. Later we had to change the way points to avoid the warning zone and let it take off. More information can be found in the mission procedure.

B. Mission Procedure
We set up the M210 with the checklist. The propellers, Z30, batteries, landing gears, GPS, and the SD card were loaded. It was put in front of the car so we can follow. The following issues repeated appearing:
- The mission planning App kept freezing, so I had to keep rebooting the tablet.
- Crystalsky can not reboot: it didn’t matter if we reboot or turned off, the Crystalsky was struggling connecting to the controller and the M210.
- Way-point mission couldn’t start. First, I controlled it to the air, but we couldn’t start the mission. It kept saying something like “switch to F-mode” and couldn’t take-off. We moved the way points away from the yellow warning zone, it still failed. We tried many times, finally we set the maximum flight distance to maximum (around 26k ft), lowered the mission height to 264 ft, and started the mission on the ground, then it started the mission.
- The information shown right before the “Start” mission was not consistent with the setting. We just started the mission and the actual.
- The M210 performed sudden stops at every way point by tilting back at the maximum angle, and performed maximum acceleration at the beginning of the next path by tilting forward at the maximum angle. This causes the landing gear to show up in the Z30 frame and the gimbal start spinning. This made the sensor operator harder to control and reduce the video quality.
The driver was keeping the vehicle speed at 20 mph which is the set speed of the mission, and the double-blinking warning lights were on. Near the end of the mission, the batteries were so low that the controller started beeping, so I had to abort the mission and bring it back to the ground. As the PIC, my task was to monitor the flight path, flight time, and the mission progress. I reported the path, speed, altitude, and other relative information every half to one minute.


IV. Reflection
- Compare equipment and ease of use.
- Since this is our first time using the M210 to fly in the mission mode, we encountered a lot of questions. But eventually we performed a mission flight on a moving vehicle.
- Safety concerns.
- Mission Height and Obstacle
- The mission altitude was 264 ft, which was far above the highest obstacle the M210 could encounter, so the ground obstacle was not an issue.
- Visual Line of Sight
- The car has a roof, so I had to move my body forward to actually see the UAV. The driver should just focus on the road itself and stop at the stop sign. It’s better to have a fourth person as the visual observer.
- Mission Height and Obstacle
- Quality of imagery.
- The quality of Z30 and the gimbal can provide stable high resolution video. However, due to the sudden stop at the way points and the video quality setting (720P), the overall video quality was not as good as we expected.