I. Intro
Date: 09/19/2022
We used Pix4DCapture and DJI Mavic 2 Pro to operate a mission over part of PWA. Although there was an incident during the mission, eventually it was completed.
II. Field Condition
1. Site Condition
The flying site is at Purdue Wildlife Area. There is a row of tall trees aside of the dirt road, the bushes are about 10 feet tall at the cross, and more tall trees are to the north of the cross. Poison Ivy grows at the corner of the cross.
2. Weather Condition
- Temperature: 27℃, feels hotter because of the high humidity.
- Wind: northwest, 6.4 km/h
- Cloud: 40%, darker and bigger clouds were approaching from the west.

3. Safety Assessment
- The trees are tall, make sure M300 doesn’t fly into the trees
- Poison Ivy is growing nearby, which could cause skin problems if there is contact with the skin.
- Sun is bright, and the eyes should be protected by sunglasses.
- The body should be kept hydrated to prevent heat stroke.
III. Operation
1. Preparation
Launchpad was placed in the middle of the dirt road. The transmitter was turned on, and Mavic 2 Pro was powered up and placed on the launchpad. Geofence was disabled, and the storage location was selected to external SD card
2. Flight Details
(1). General Information
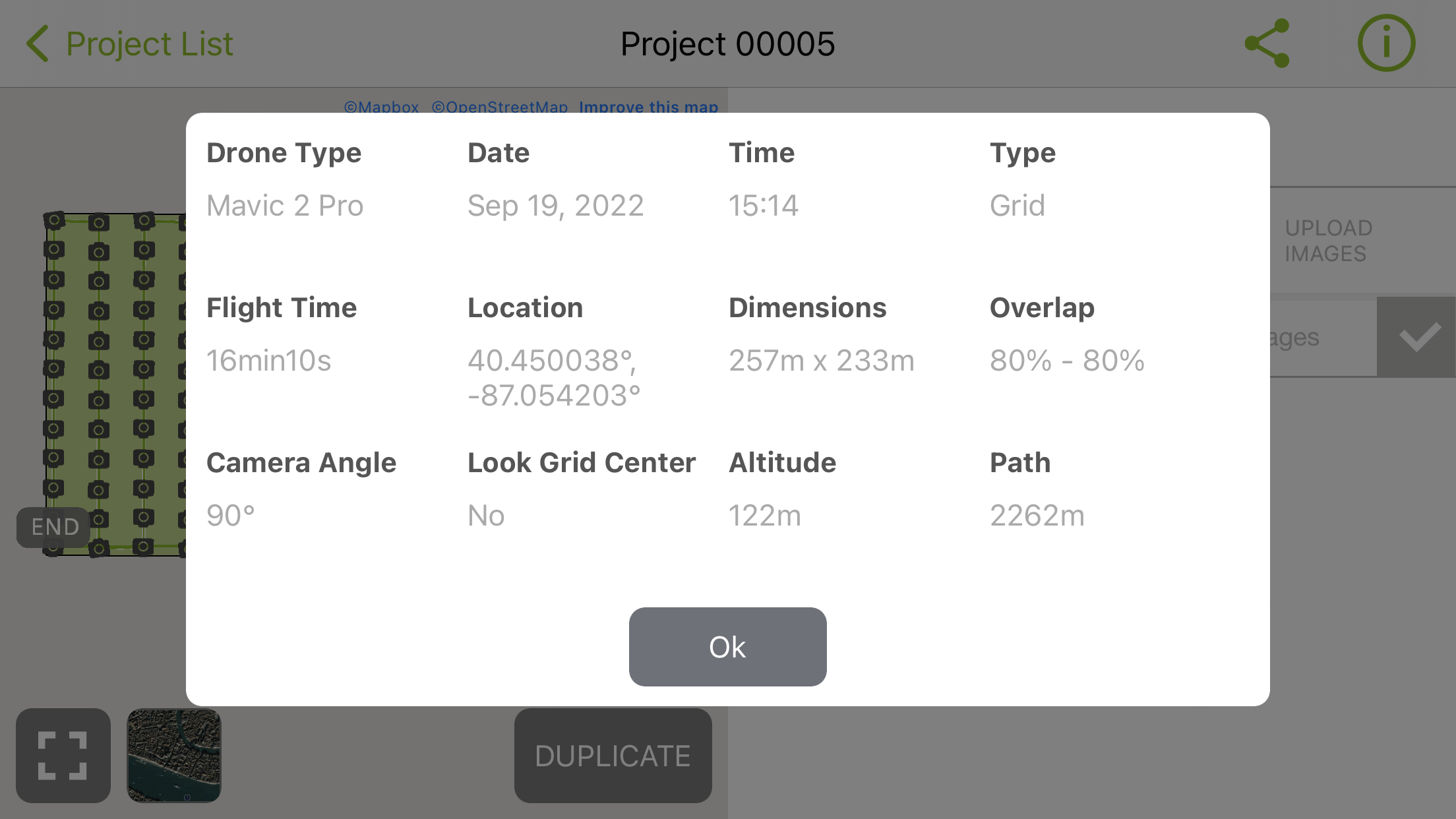
- Location: Purdue Wildlife Area 40.450038 degree N, -87.054203 degree W
- Vehicle: DJI Mavic 2 Pro AI
- Sensor: DJI Mavic 2 Pro Camera (more detail at https://www.dji.com/mavic-2)
- Battery: DJI Mavic 2 Pro Battery
- Approval # (LAANC/COA/Waiver): NA (below 400 ft AGL in class G)
(2). Flight Information
- Flight Number: 2
- Takeoff Time: Flight 1: 15:14 Flight 2: 15:22
- Landing Time: Flight 1: 15:20 Flight 2: 15:29
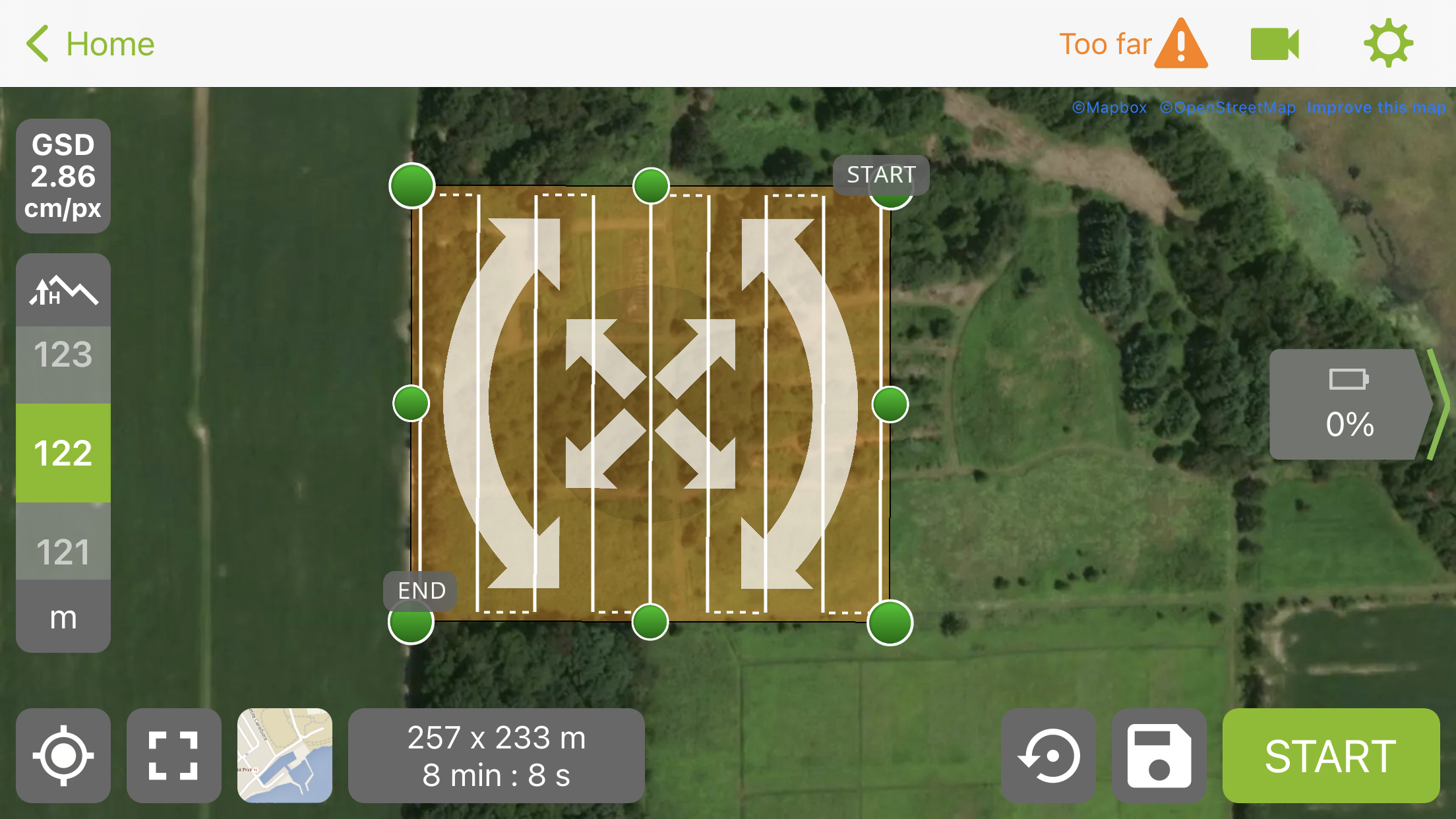
- Altitude (m): 122
- Sensor Angle: 90 degrees
- Overlap: 80%
- Sidelap: 80%
- PIC: Dingming Lu
- VO: Caleb Gascho, Harrison Guinn
3. Flight Operation
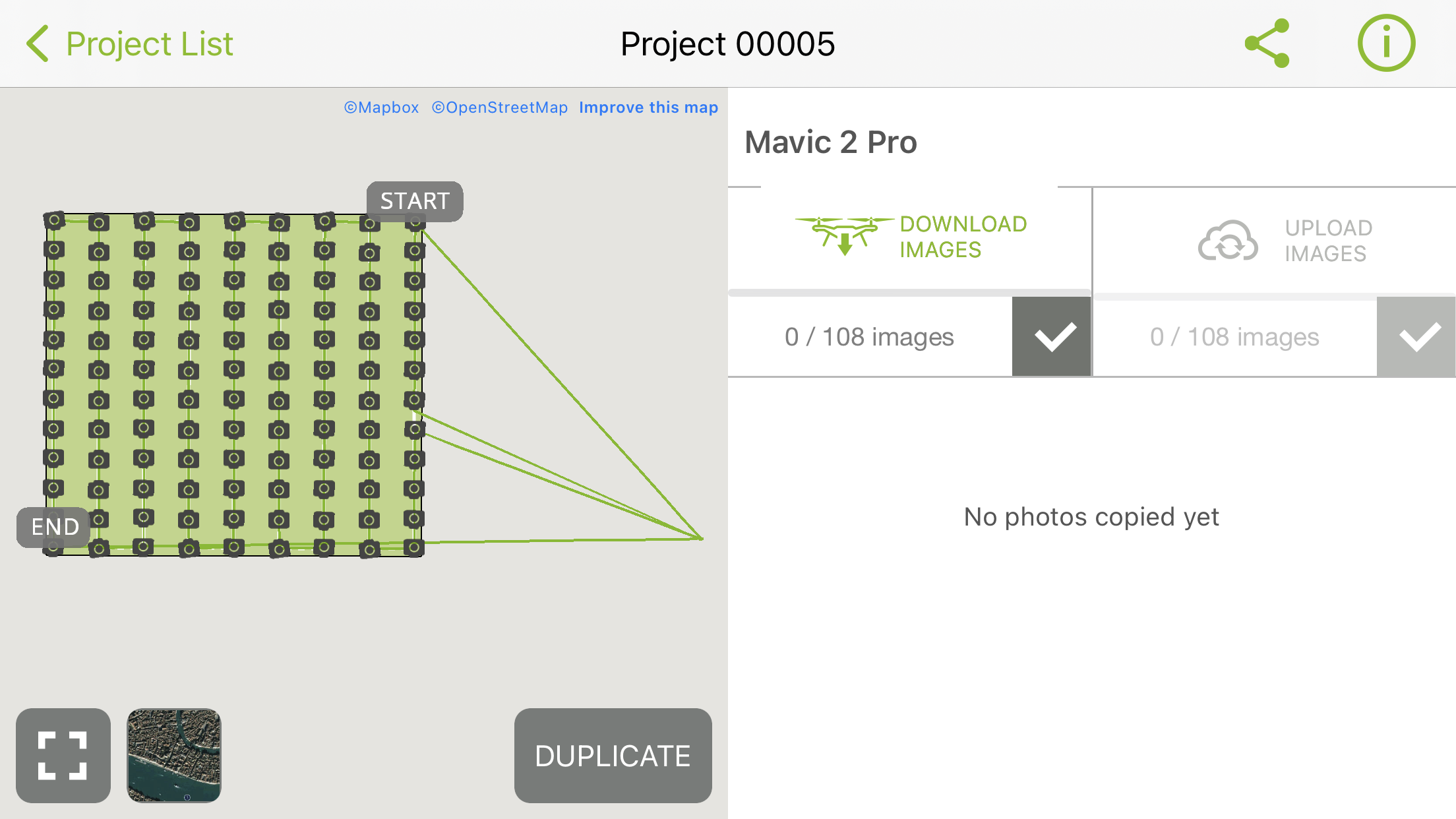
We were using DJI GO 4 and Pix4DCapture to operate. In DJI GO 4, we disabled the geofence and set the storage location to the sd card. Once they were set in DJI GO 4, we went to the Pix4DCapture, open the mission, and start the mission. It took off automatically. But there was an incident. When the PIC (Dingming Lu) went back to DJI GO 4 and started recording, it’s not taking pictures anymore (it didn’t show the pictures were taken when the Mavic was flying along the path), so we pause the mission, and the Mavic landed. We changed a new battery, made sure the settings were correct in DJI GO 4, then we resume the mission in Pix4DCapture. It took off automatically again and headed to where the next picture that should be taken right after it started recording in DJI GO 4). It finished the mission successfully and landed safely.